
The loss of contact with a cargo ship rarely happens without a sequence of failures aligning under pressure. In the case of the Mariana, those conditions formed quickly and with little margin for correction. What began as a propulsion issue turned into a full-scale survival scenario as a typhoon moved across its operating corridor.
This article reconstructs the cargo ship incident step by step. It focuses on system behavior, environmental load, and operational decisions rather than surface-level reporting. The goal is to understand how the vessel reached a capsized state and why recovery options narrowed so rapidly.
Vessel Profile and Operational Role
The Mariana was not a deep-sea container carrier. It operated as an offshore supply vessel, designed for short-range cargo transport between Guam, Tinian, and Saipan. Its 145-foot length places it in a category where maneuverability matters more than mass stability.

These vessels typically rely on twin-engine configurations to maintain redundancy. Cargo loads are often variable, which directly affects center of gravity and roll behavior. Unlike larger cargo ships, smaller supply vessels react faster to wave impact and wind force, with less structural inertia to stabilize motion.
In calm conditions, this design allows efficient routing and flexible operations. Under storm pressure, the same characteristics reduce tolerance to system degradation.
Stability and Load Sensitivity
The stability envelope of a vessel like the Mariana depends on three variables: cargo distribution, ballast adjustment, and propulsion control. If one variable fails, the system can compensate. If two degrade simultaneously, control begins to collapse.
A disabled engine introduces asymmetry. The vessel loses not only propulsion power but also directional correction capacity. This becomes critical when external forces—wind and waves—begin to dominate movement.
Engine Failure as the First Critical Event
The cargo ship reported a disabled starboard engine before losing contact. This detail defines the entire incident trajectory. A single-engine operation in open water is manageable under moderate conditions, but it reduces redundancy to zero.

With only one operational engine, the vessel must constantly correct yaw and drift. Fuel consumption increases, response time slows, and mechanical stress rises on the remaining system. More importantly, the vessel cannot effectively counter lateral forces from wind-driven seas.
In this case, the engine failure occurred while the vessel was already exposed, approximately 125 to 140 miles from Saipan. This distance placed it outside immediate assistance range and within open ocean conditions where wave patterns are less predictable.
Propulsion Imbalance and Drift
Once propulsion symmetry is lost, drift becomes a dominant factor. The vessel begins to align with prevailing wind direction rather than intended heading. This reduces forward progress and increases exposure time within the storm path.
The longer the vessel remains in this state, the more likely secondary failures emerge, including steering overload or fuel system strain.
Typhoon Sinlaku: Environmental Load Beyond Design Limits
Typhoon Sinlaku introduced sustained winds between 125 and 150 mph over a 48-hour period. At this level, the environment is no longer a variable—it becomes the controlling force.
Wind generates wave systems that increase both height and frequency. For a vessel of this size, wave periods shorten, leading to rapid pitch and roll cycles. These cycles fatigue both structure and crew.
Water ingress risk rises sharply. Even without hull breach, repeated wave impact can force water onto deck surfaces, shifting weight unpredictably.
Wind, Wave, and Vessel Interaction
The interaction between wind and vessel profile determines stability under extreme conditions. A supply vessel presents a relatively high surface area relative to its mass. This increases wind leverage.
Three effects dominate:
- lateral push causing uncontrolled drift
- rolling amplification due to wave alignment
- reduced propulsion efficiency as propellers ventilate in heavy seas
Once these effects synchronize, control becomes reactive rather than proactive.
Loss of Communication and Control Window
The cargo ship lost contact with the Coast Guard on April 15. This marks the transition from a controlled emergency to an unknown-state event.
Communication loss at sea is rarely instantaneous. It often follows system degradation—power fluctuations, antenna damage, or crew prioritizing survival procedures over reporting.
The timing aligns with the typhoon’s approach. This suggests that the vessel entered peak environmental stress shortly after reporting engine failure.
The Narrow Decision Window
At this stage, the crew would have had limited options:
- attempt to maintain heading with reduced propulsion
- deploy emergency signaling equipment
- prepare life-saving gear
Each decision carries trade-offs. Maintaining heading consumes fuel and stresses the remaining engine. Preparing for evacuation reduces time spent on navigation.
Capsizing Mechanics: How the Vessel Likely Overturned

The capsized state of the cargo ship indicates a loss of stability beyond recovery. This typically occurs when the righting moment of the vessel is exceeded by external forces.
In practical terms, the vessel rolled past a critical angle and failed to return upright.
Several contributing factors align:
- asymmetric propulsion limiting corrective action
- high wave impact creating rolling momentum
- possible cargo shift altering center of gravity
Once cargo shifts, the vessel’s stability curve changes instantly. Recovery becomes unlikely.
Critical Angle and Point of No Return
Every vessel has a maximum roll angle beyond which it cannot self-correct. In heavy seas, repeated rolling can push the vessel closer to this threshold.
A single large wave can then complete the capsize sequence. This is often sudden, leaving minimal time for structured evacuation.
Search and Detection Operations
Search operations covered over 75,000 square nautical miles. This scale reflects both the uncertainty of drift and the time delay between last contact and search deployment.
Initial aerial search attempts were blocked by weather. This delay allowed debris fields to disperse and the vessel itself to drift.
The overturned cargo ship was eventually located approximately 100 nautical miles from its last known position. This displacement indicates sustained drift under storm conditions.
Multi-Agency Coordination
The U.S. Coast Guard worked alongside the Japan Coast Guard to reach the site. Deployment included pararescuemen and divers, supported by vessels capable of operating in post-storm conditions.
The use of remotely operated underwater vehicles suggests the need for detailed structural assessment, especially if internal access is required.
Drift Dynamics After Capsizing
Once the cargo ship overturned, it effectively became a passive object driven by wind, surface current, and wave momentum. In this state, propulsion is irrelevant. The hull orientation defines how the vessel interacts with the environment.
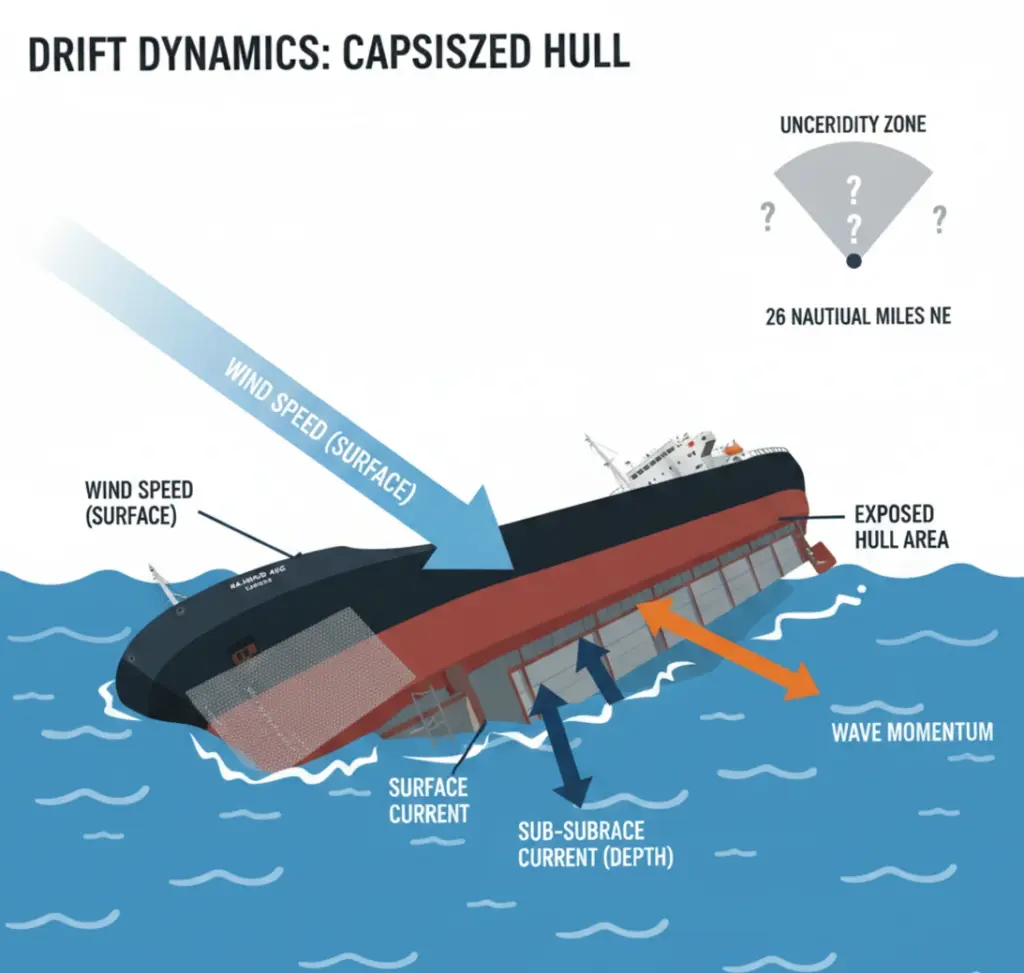
An inverted hull presents a different resistance profile. Instead of cutting through water, it rides over it. This increases drift speed under strong wind conditions. The reported movement of approximately 26 nautical miles to the northeast after initial detection aligns with this behavior.
Drift calculation in such cases depends on three inputs: wind speed at surface level, current direction at different depths, and the exposed area of the hull above water. Even small variations in these inputs create wide uncertainty zones, which complicates search patterns.
Expanding Search Grid Complexity
As drift continues, the search area expands non-linearly. A 24-hour delay in locating debris can double the search radius. In storm-affected regions, this expansion accelerates due to variable currents.
Search teams must account for reverse drift scenarios, where floating objects move in slightly different directions depending on their buoyancy and shape. A life raft, for example, behaves differently than a capsized hull.
This explains the distance between the overturned vessel and the located life raft. Separation is not random—it reflects different drift vectors over time.
Life Raft Deployment and Survival Variables
The partially submerged and partially inflated life raft introduces a critical unknown. Its condition suggests deployment occurred under unstable conditions, possibly during or immediately after capsizing.
Life rafts are designed to inflate automatically when deployed correctly. Partial inflation indicates either mechanical interference or insufficient activation time. In heavy seas, deployment can fail if the raft is caught in rigging or impacted by waves before full inflation.
The position of the raft—approximately 95 nautical miles from the overturned vessel—indicates prolonged drift. This distance cannot be explained by a single event. It implies continuous movement over several hours or days.
Survival Window at Sea
Survival after abandoning a cargo ship depends on exposure, water temperature, and raft condition. In tropical regions like the Northern Mariana Islands, hypothermia risk is lower, but dehydration and wave exposure remain critical threats.
Without full inflation, a raft provides limited protection. Crew members face constant water ingress, instability, and difficulty maintaining position.
Survival time in such conditions is highly variable. It ranges from several hours in worst-case exposure to multiple days if partial shelter is maintained.
Structural State of the Overturned Vessel
The external survey conducted by divers provides limited but important information. An intact hull suggests that capsizing was not caused by structural failure but by stability loss.
This distinction matters. A structurally compromised vessel behaves differently in water, often breaking apart quickly. In this case, the cargo ship remained largely intact, which supports the theory of dynamic rollover rather than impact or collision.
However, internal conditions remain unknown. Flooding, cargo displacement, and equipment damage cannot be assessed without deeper inspection.
Role of Underwater Investigation
The potential deployment of a remotely operated vehicle introduces the next phase of analysis. ROVs allow controlled inspection of submerged sections without risking diver safety.
Key inspection targets include:
- hull integrity below waterline
- cargo hold condition and load distribution
- engine room flooding status
These factors help reconstruct the final moments before capsizing. They also determine whether the vessel can be stabilized or must be treated as a total loss.
Human Decision Chain Under Pressure
Mechanical failure and environmental force define the outer limits of an incident. Inside those limits, human decisions shape the outcome.

The crew of six faced a compressed timeline. Engine failure occurred ahead of a major storm system. From that point, every decision had to balance navigation, system preservation, and survival preparation.
Maintaining course with a disabled engine consumes time and fuel. Turning away from the storm requires sufficient propulsion and distance. Preparing evacuation procedures reduces focus on vessel control.
Decision Constraints in Real Time
In high-risk maritime conditions, decisions are not made in isolation. Each action removes an alternative.
If the crew committed to maintaining heading, they extended exposure to storm conditions. If they shifted to evacuation preparation too early, they risked losing control prematurely.
These constraints are rarely visible in final reports, but they define the sequence of events leading to capsizing.
Search Scale and Operational Limits
The reported search area of over 75,000 square nautical miles reflects both urgency and limitation. Large-scale search operations rely on probability, not certainty.
Aircraft, vessels, and satellite data are combined to identify patterns. However, weather conditions reduce visibility, distort radar signals, and delay deployment.
The initial inability to deploy an HC-130 aircraft demonstrates this limitation. When search assets cannot reach the area, the timeline shifts in favor of drift and dispersion.
Coordination Between Agencies
Joint operations between the U.S. Coast Guard and the Japan Coast Guard expand coverage and resource availability. Different vessels bring varied capabilities—speed, endurance, and equipment range.
However, coordination also introduces complexity. Communication protocols, search grid alignment, and data sharing must be synchronized under time pressure.
In this case, coordination allowed faster confirmation of the vessel identity and deployment of specialized teams, but it could not eliminate the environmental constraints affecting search efficiency.
System Failure Cascade in Cargo Ship Incidents
The Mariana incident follows a recognizable pattern seen in smaller cargo ship operations. A single technical failure initiates a cascade when combined with environmental stress.
The sequence typically unfolds as follows:
- propulsion loss reduces control
- environmental forces increase system load
- response time shortens as conditions worsen
- stability margins collapse under combined stress
Each stage reduces available options. The transition from manageable failure to catastrophic outcome can occur within hours.
Limits of Redundancy
Redundancy is effective only within defined thresholds. A twin-engine setup provides backup under normal conditions. Under typhoon-level stress, one engine is not a backup—it is a constraint.
This defines the boundary between design capability and real-world exposure. Vessels operating in regions with rapid weather escalation face higher risk when redundancy is compromised early.
Observations on the Cargo Ship Incident
The capsizing of the Mariana was not the result of a single failure. It was the intersection of mechanical limitation, environmental force, and constrained decision-making.
The cargo ship entered a storm corridor with reduced propulsion capacity. From that point, control degraded progressively. Drift increased exposure, wave impact destabilized the vessel, and a critical roll angle was eventually exceeded.
Search operations reflect the scale of the event, not its resolution. The absence of confirmed crew location highlights the gap between detection and recovery in open water incidents.
Understanding this cargo ship case requires viewing it as a system under pressure. Each component—engine, hull, crew, environment—interacted within limits. Once those limits were crossed, recovery was no longer possible within the available timeframe.